Digital signal processing builds upon concepts from continuous‑time systems. The bridge between the two worlds is the z‑transform, which maps the familiar s‑plane (Laplace domain) into the discrete‑time z‑plane. Understanding this mapping is essential for anyone designing digital filters or analyzing discrete‑time systems.
In the s‑plane, stability depends on whether poles lie in the left half‑plane. In the z‑plane, the condition becomes whether poles lie inside the unit circle. The transformation $z = e^{sT}$ preserves stability and reveals how key properties such as damping and natural frequency translate into the discrete domain.
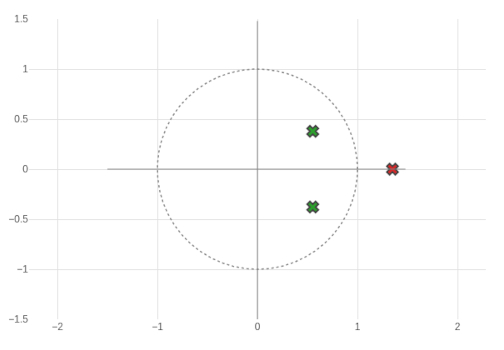
This method is fundamental for stability analysis and system behaviour prediction in digital filters and discrete‑time systems. The z‑plane provides a rich geometric interpretation: the radial distance from the origin determines the damping (how fast transients decay), and the angular position determines the frequency of oscillation. Poles inside the unit circle (|z| < 1) guarantee stability, with smaller radii corresponding to faster damping. The angle measured from the positive real axis, converted to continuous‑time frequency via $ω = θ/T$, reveals the resonant frequency of the system. This unified framework simplifies both analysis and design.
Full article: s‑plane to z‑plane: Poles, Stability and Transformation — a complete guide with examples, figures, and exercises.
Reference: Bob Meddins, Introduction to Digital Signal Processing, Butterworth-Heinemann, 2000.